


对天空测光曝光下拍摄,然后提升了阴影,利用了相机捕获的动态范围,获得了比通常JPEG中动态范围大得多的图像
什么是动态范围?

左图为普通动态范围,右图调高了动态范围
动态范围(Dynamic Range,简称DR)被广泛引用,有时也被当作图像质量的衡量标准来讨论。实际上,动态范围是图像质量的一个方面,体现摄影的细节和层次以及质感。我们需要了解的是什么是动态范围,以及怎么调整参数,让相机性能的优势发挥出来。
图像质量作为一个整体包含一系列属性,例如颜色和分辨率(因此需要考虑白平衡和清晰度等)。但即使您只是考虑相机或传感器对不同亮度水平的色调响应,动态范围数字仍然是你需要了解的重点。
简而言之,动态范围是您的相机可以捕捉到的主体亮度范围,从最亮(信息“剪辑”的地方)到最暗的可用色调。它可以很好地指示从相机中输出的 Raw 文件有多灵活。但它并没有告诉你更多。
动态范围的差异通常存在于图像的阴影中。数字传感器在高光中有一个“临界点”:任何额外的信号都会简单地记录为最大原始值,超出此范围的任何东西都无法恢复,因此在高亮范围进行额外的DR范围有限。
如果一种新的传感器设计对光线有更大的容忍度,它的基本ISO范围就更广,参数上带给用户更多信心,在更广泛的光线范围内应用。这类相机的影像素质,可以让摄友在阴影中可以找到额外的动态范围,并且与其他想相机传感器相比,差异也比较明显。
应用动态范围主要“靠感觉”?

原始文件

在Adobe Camera Raw中将曝光设置为+5
当前评估DR的下限存在模棱两可的情况。DR 数字描述了最亮的捕获色调和最暗的可用色调之间的距离,但它们不会告诉你关于这两点之间任何色调的信息。即使你已经确定了较低的截止值,提供了12档DR的相机在第 11、10、9挡处,用肉眼也看不出太大差异。比如松下GH6具备12+档动态范围,如果开启动态范围增强能够达到13+档动态范围(ISO只能设定为2000)。松下GH6搭载的是V-Log伽马曲线,对于色彩的保留更好,对于高光保留更好,后期处理更舒服。各个机器的内部参数调节和技术不一样,对于用户来说,其实不是很直观的能了解到。
通过DR参数判断相机有点像被蒙上眼睛并抓住动物的尾巴,你可以根据它离地面的距离和感觉来猜测,但最终你不能完全确定尾巴是附在大象还是驴子身上。要了解影响动态范围的因素,还需要了解到什么是噪点,包括为什么图像中测得的噪点值可能位于你认为在图像中最干净的地方。
实际拍摄中,摄影的动态范围还是有一点回旋余地,因为传感器的红色、绿色和蓝色通道不会都在相同的亮度水平下剪辑。但是一旦一个通道达到“极限”(高光过曝),重建颜色的准确性就很小了。相机通常会尽其所能利用可能多的高光信息, 比如Raw文件包括了更多色彩信息,但是恢复高光的可能性也要看运气。
令人烦恼的噪点
高ISO下,噪点基本充斥着整个图片
噪点是图像中一种亮度或颜色信息的随机变化(被拍摄物体本身并没有),通常是电子噪点的表现,图像噪点是图像拍摄过程中大家最不希望看到的“信息”。图像噪点的强度范围可以存在于具有良好光照条件的数字图片中,也可以满画幅充斥在光学天文学或射电天文学中。
噪点为什么产生?CCD和CMOS感光元件都存在有热稳定性(Hot pixel)的问题,与成像的质量和温度有关,如果机器的温度升高,噪点信号过强,会在画面上不应该有的地方形成杂色的斑点,这些点就是我们所讲的噪点。各个品牌各种型号的相机对噪点的控制能力也不尽相同,同一型号的相机也有一定的个体差异,也有些相机有降噪功能。但噪点问题是现在所有DC都没能完全克服的问题(调高感光度(ISO),特别是长时间曝光、或相机温度升高时)。噪点的多少因传感器构造以及处理器差异而不同。
回到动态范围上, 将下限设置为最暗的“可用”色调,是一种主观判断。DR有一个技术定义,通常称为“工程 DR”,它使用噪点级别等于场景信号强度的点(信噪比为1),这其实比大多数人在视觉上接受的噪点要多得多,只是平时我们没有100%的放大图片去数而已。
除了相机具有多少可用动态范围之外,摄友的工作流程也会对结果产生影响。由于DR 的下限基于噪点,因此它还受到缩放图像和降噪的影响。如果摄影师应用一些复杂的降噪功能,或者持续拍摄视频让相机无法冷却,也会改变相机可用动态范围的表现。
信噪比是什么
如上所述,噪点是一种我们可以直观看到的现象。一般来说,噪点是真实信号的偏移,表现为与背景不相容的杂信号。例如,在一个红色的物体上出现绿色的信号,或者在一个灰色物体上出现了白色信号,这些信号就是我们所说的噪点。这就涉及到一个问题:噪点与信号是相辅相成的,或者说噪点本身也是信号的一种,无非是我们不需要的信号,抑或不正确的信号。
噪点是不正确的信号,因此在单色的背景上往往会更加明显,比如天空的图像中就非常容易观察到噪点。在同一幅照片中,亮度较低的部分噪点水平也会更高,这是由于光子噪点更明显而造成的。
大部分感光元件采用RGBG的形式排列像素,所以数码相机捕捉的彩色图像上也会出现彩色噪点。显然,撇开信号来谈论噪点是没有意义的。噪声是模拟设备与电子设备普遍存在的问题,噪点是噪声在数码图像上的表现形式。
假设某个采样设备获得的噪声是1,你能否判断这样的噪声是否明显呢?答案是否定的。因为我们只有在了解信号的强度以后才能够判断“1”到底是较强的噪声还是微弱的噪声。如果采样设备获得的信号也是1,这时候信号相对噪声的比值是1:1,噪声就非常高,高到信号本身已经失去意义。假如采样获得的信号是10000000,这时候信号相对噪声的比值就非常大,噪声就显得相对很低。
为了评判噪声相对信号的强弱,我们通常用信噪比(signal noise ratio,SNR)来衡量某个设备或者系统的噪声水平。信噪比的定义非常简单,它就是信号与噪声的比值:SNR=S/N
等式中S代表信号,N代表噪声。信号越高,噪声越小,信噪比就越高;信号越低、噪声越大,信噪比就越低。信噪比一般用分贝(db)来表示。分贝的定义是:db=10lg(S/N)
在上面的例子中,信号与噪声都为1,其信噪比为0(lg1=0)。直观地说,由于信号与噪声是一样的,根本就无法区分信号和噪声,所以也就没有所谓的信噪比了。而在信号与噪声比值为10000000:1的情况下,其信噪比为70db。
信噪比直观地体现了设备的信号采集性能。表现在数码摄影中,采集的图像信噪比越低,噪点就越明显;信噪比越高,画面就越干净。在数码图像的生成过程中,有很多环节会引入噪点。
为什么信噪比如此重要
与直觉相反,从数字上看,高光的变化程度比阴影的变化更大,但我们认为阴影是图像的“噪声”部分。这是因为噪声的程度并不是您认为的噪声,重要的是信号和噪声之间的关系。与构成高光的强信号相比,少量噪声对构成图像阴影区域的微小、微弱信号的影响要大得多。
让我们看看这两种噪声源的影响,即电子读取噪声和光子散粒噪声。表一显示了能够保留多达 40000 个光电子的相机理论信号(蓝线,左侧刻度)。右侧刻度绘制了我们通常可能期望的光子散粒噪声(橙色线)和读出噪声(绿色线)的量,从最暗的可记录色调(底部刻度,0% 亮度)到削波(100% 亮度)。
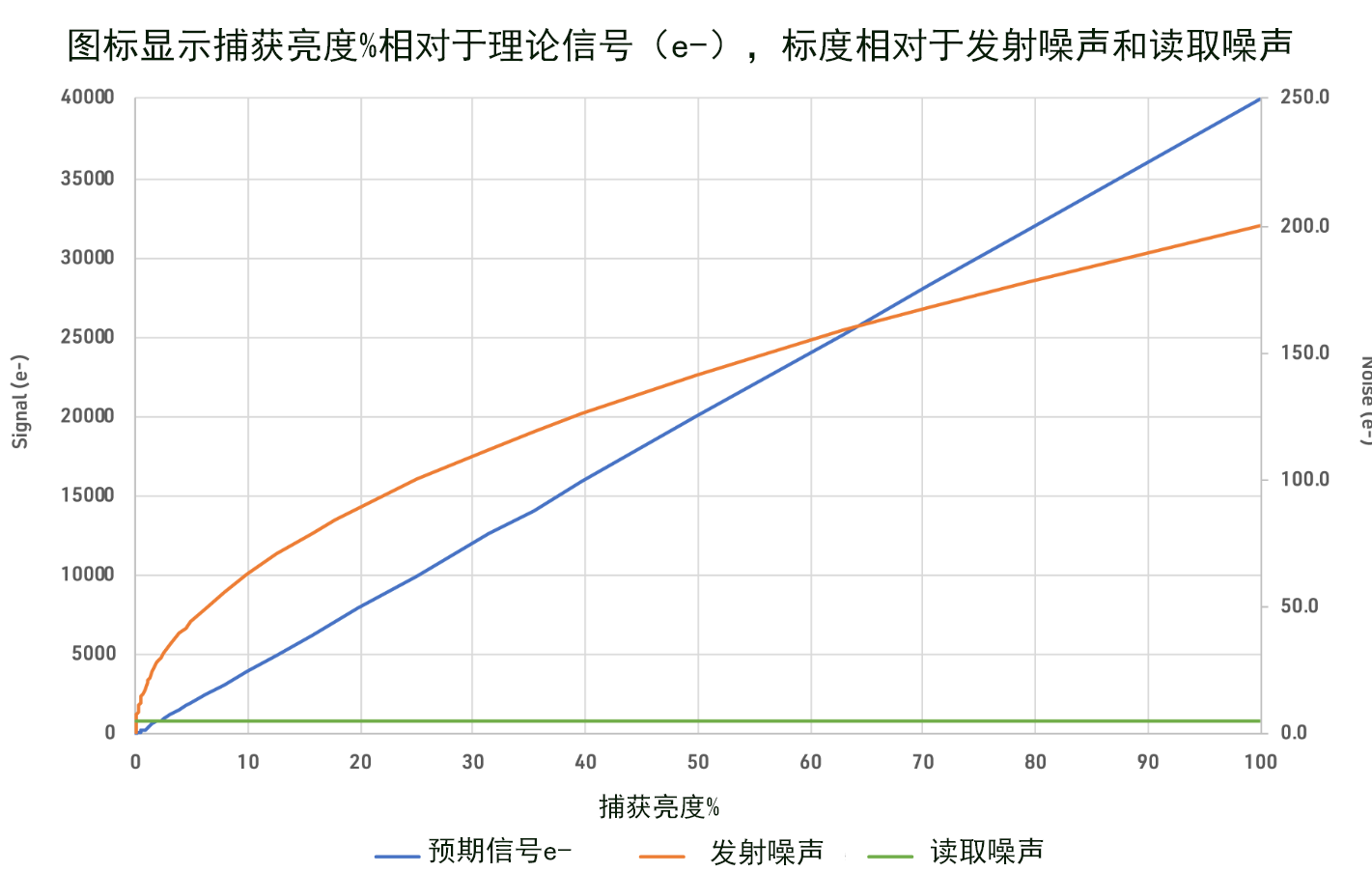
表一:相机理论信号
需要认识到的一个关键问题是,即使是一台完全不向其图像添加电子噪声的假想相机,仍然会有嘈杂的阴影。光子散粒噪声(光的随机性)意味着捕获的图像总是有噪声。但为了弄清楚为什么这种噪声通常出现在阴影区域,我们将把橙色线计入蓝色线,并查看由此产生的信噪比。
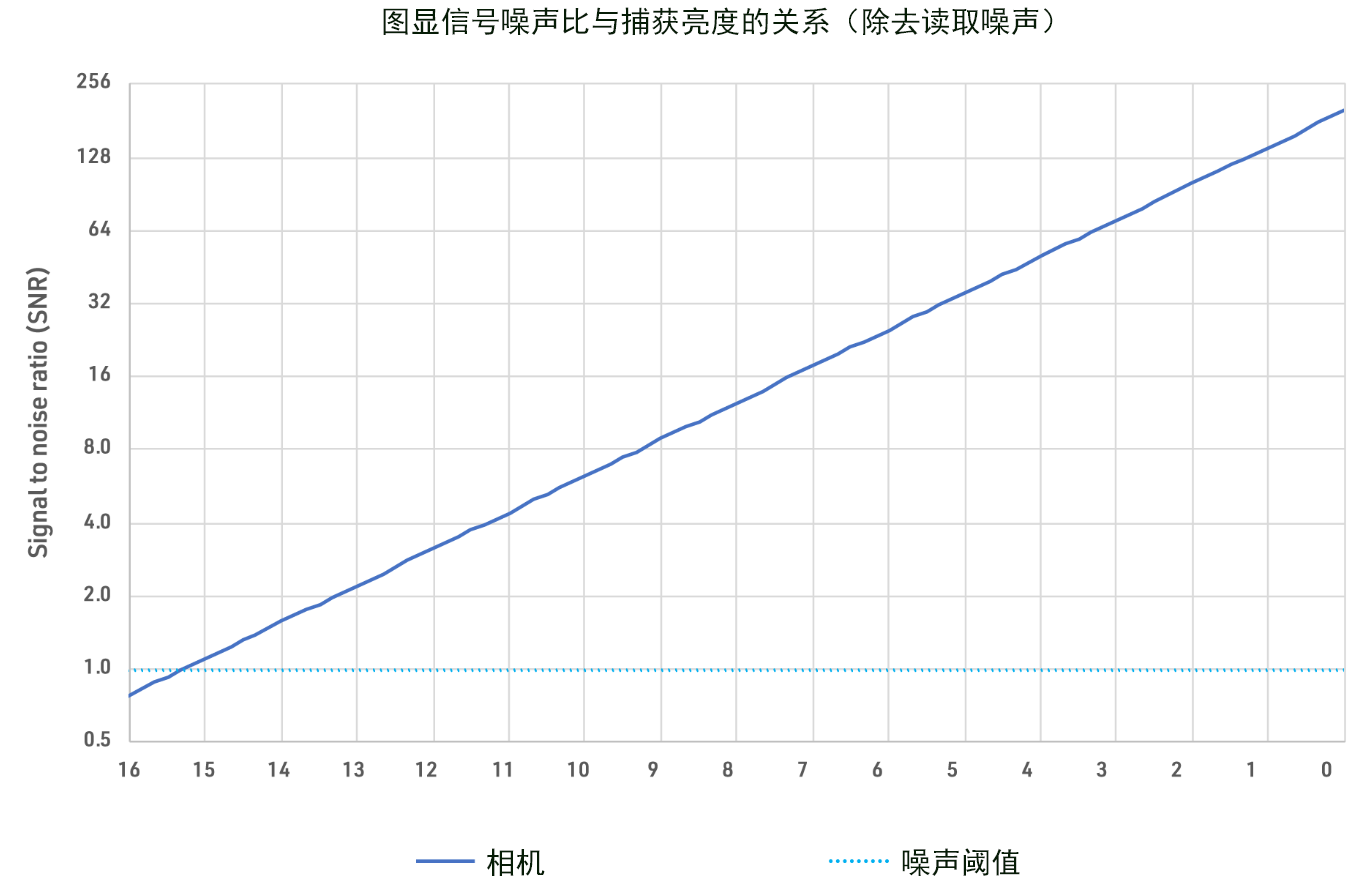
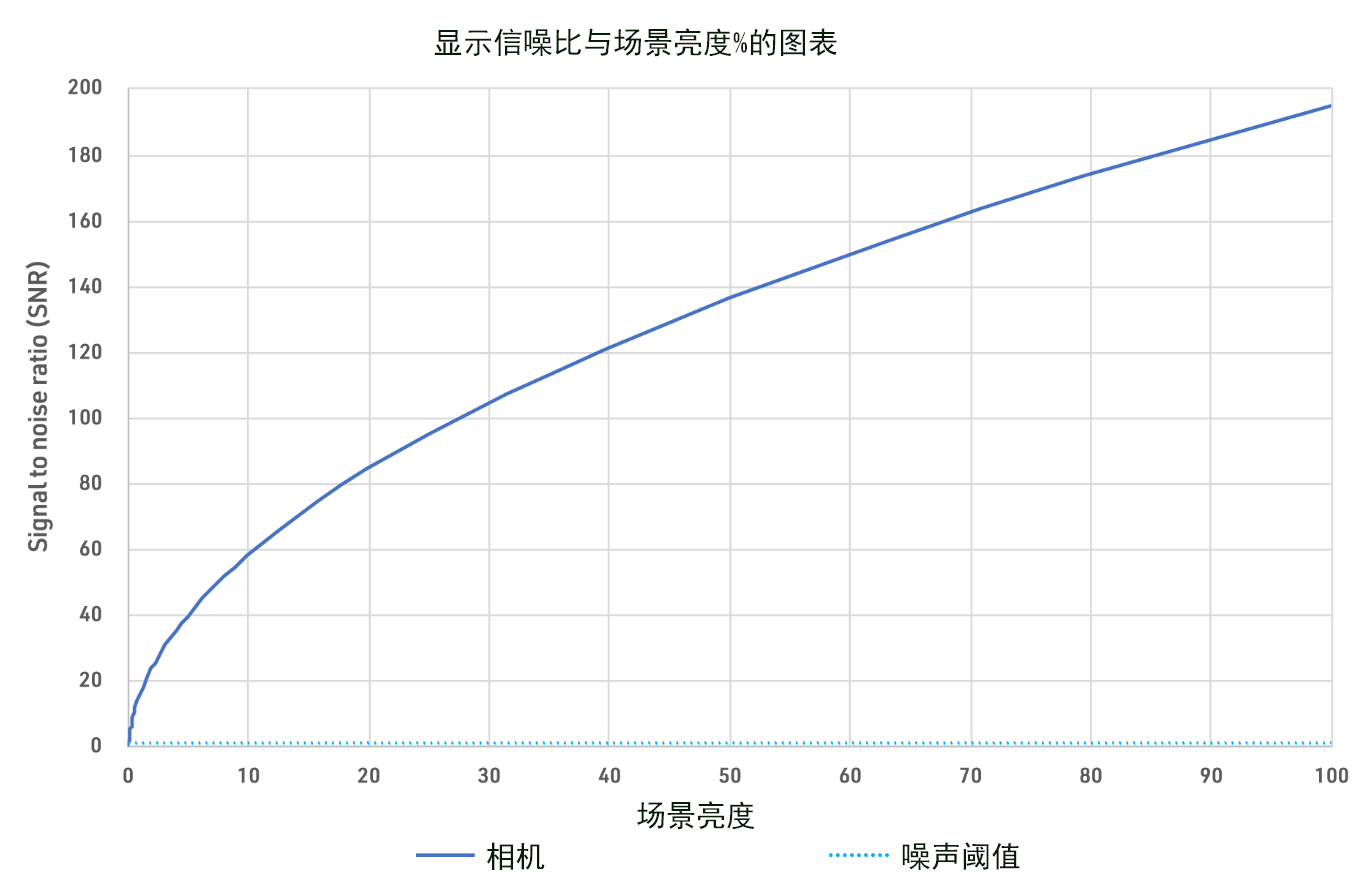
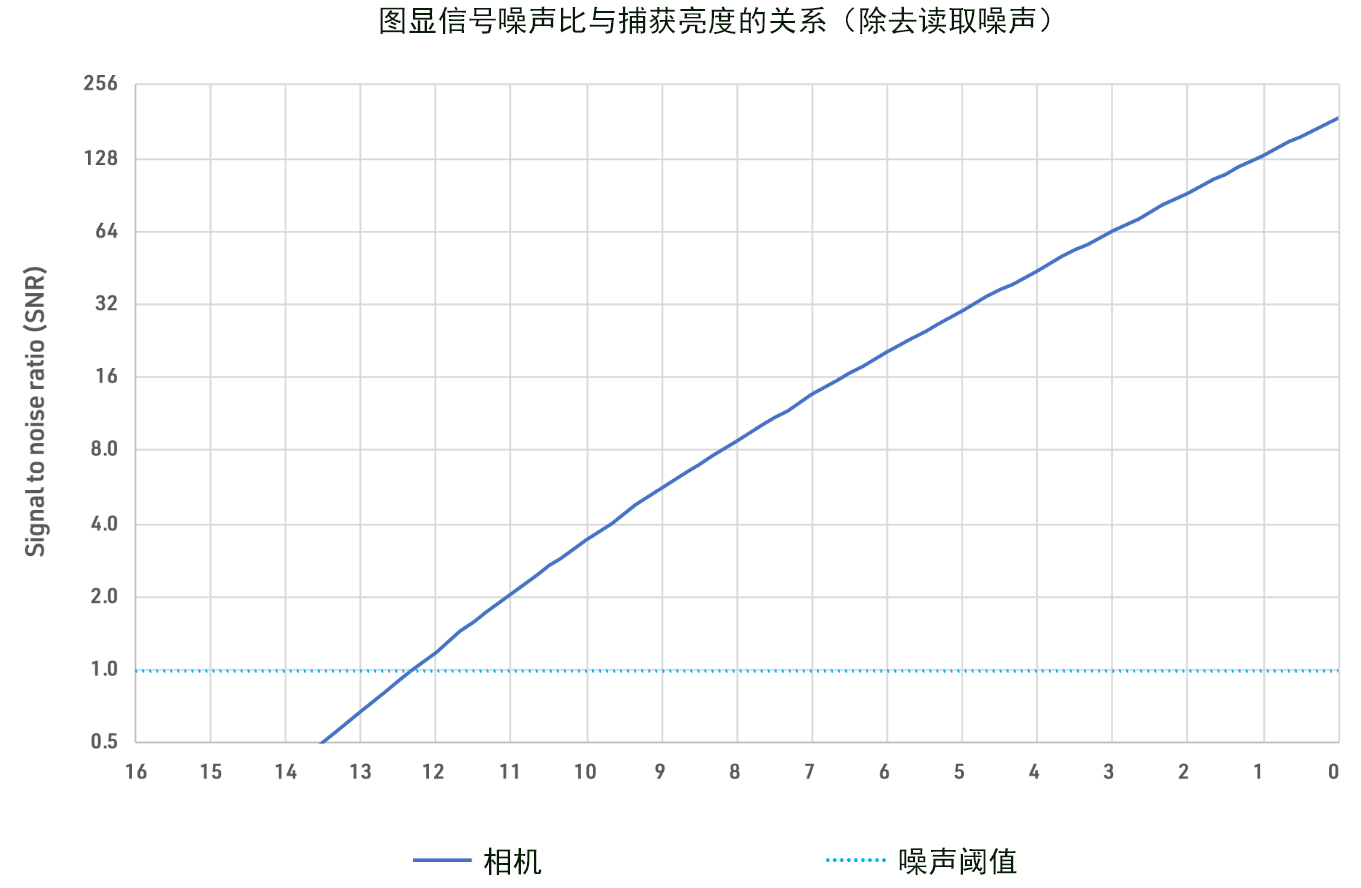
表二,不同亮度级别的信噪比
表二的两张图显示了图像中不同亮度级别的信噪比,展示了信噪比如何随着亮度(信号)的增加而增加。轴绘制在对数刻度上,因此每个格代表亮度或信噪比的加倍或减半。
现代数码相机中的传感器并不完美:在捕获光线时会添加少量电子噪声,并且会在读出过程中进一步添加更多噪声,直到信号被相机的编码器编码为数字数字模数转换器。
这种电子/“读取”噪声有多种来源,包括传感器变热时的热噪声,长时间曝光尤其会让这个数值上升。如果我们将读取噪声的影响添加到图表三中,可以看到它们对整体 SNR 响应曲线的影响。
读取噪声使信噪比底部曲线发生偏移
即使读取噪声的总量相对较小,它仍然对信号较弱的区域(即阴影)具有明显影响。在这种情况下,我们假设读取噪声为5个电子(按照现代标准,这对高光几乎没有影响(削波时SNR 降低了 0.04EV),但足以将测得的工程动态范围从大约 15.3EV 降低到 12.3EV。
弱光情况会降低信噪比
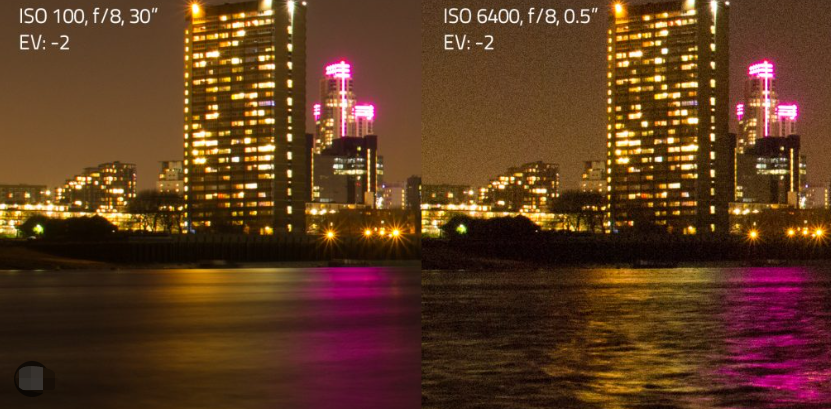
弱光摄影会以多种方式产生噪点,当肉眼发现环境光已经处于弱光时,很可能预览屏幕就会发现曝光不足的图像。环境光线不足可能会导致虚片,摄影师可能会使用高 ISO 或长时间曝光来拍摄低光照的影像,这两者都可能导致更多的相机内噪点偏多。高ISO的主要问题是动态范围减小,在高 ISO下高光部分保留得不好,就造成电平升高,形成噪点。
当下购机的共识就是选择大感光底的CMOS,日常使用低ISO,比如100~800,增大光圈,适当延长快门时间。其实在135全画幅相机中,并不是像素越高越好,想让感光像素颗粒大就必须降低像素,一般在2000万到3000万像素就比较均衡了。
暂无评论
